








近期,澳门太阳娱乐网站官网李忠奎">李忠奎研究员及其合作者在多自主体系统协调控制(cooperative control of multiagent systems)方面取得了一系列研究进展,多篇论文被控制科学的国际顶级期刊IEEE Transactions on Automatic Control和Automatica接收发表。
近年来,由于传感器技术、通信、计算以及小型化技术的快速发展,系统的各个组成单元成为了具备一定的计算、执行和通信能力的自主体(agent)。在多自主体系统中,自主体通过信息通信等方式互助协作,可以有效地完成单个个体难以完成的任务,可以降低成本, 具有更好的工作效率,提供一定的冗余度。多自主体系统协调控制问题是当前国际动力学与控制领域的一个热点研究方向,其中的一个核心问题是一致性(consensus)控制问题。
一致性控制问题的主要目标是设计合适的控制律使得自主体的状态趋于相同。由于自主体个数较多,而每个自主体的通信或测量能力有限,一致性控制律只能是分布式的,即只依赖于每个自主体和它的邻居信息。虽然国际上在一致性控制方面已存在很多结果,但这些已有结果在进行一致性控制律设计时往往需要知道通信拓扑结构的谱信息。值得指出的是,谱信息是通信拓扑结构的一个全局信息,即每个自主体需要知道整个通信拓扑结构才能计算出这些谱信息。如何设计仅依赖于局部状态或输出信息的完全分布式的一致性控制律是一个重要的开问题。李忠奎">李忠奎研究员在这方面取得了重要进展。
在下述两篇论文
[1] Z.K. Li, W. Ren, X.D. Liu, M.Y. Fu, Consensus of multiagent systems with general linear and Lipschitz nonlinear dynamics using distributed adaptive protocols,IEEE Transactions on Automatic Control, vol. 58, no. 7, pp. 1786-1791, 2013.
[2] Z.K. Li, W. Ren, X.D. Liu, L.H. Xie, Distributed consensus of linear multi-agent systems with adaptive dynamic protocols, Automatica, vol. 49, no. 7, pp. 1986-1995, 2013.
中,李忠奎">李忠奎研究员与合作者在他和段志生">段志生教授等人提出的一致性区域框架下,针对一般线性多自主体系统,提出了基于相对状态和输出信息的分布式自适应一致性控制律,证明了此自适应控制律的设计仅依赖于局部信息,是完全分布式的。论文[2]的发表过程中还出现一个插曲。论文[2]最初是以短文形式投稿的,第一轮审稿后,由于多个审稿人的高度评价和推荐,被编辑建议以长文(regular paper)形式重新投稿,并最终被接收为长文。这种情况极为少见。
在论文([3] Z.K. Li, Z.S. Duan, F.L. Lewis, Distributed robust consensus control of multi-agent systems with heterogeneous matching uncertainties, Automatica, in press, 2014. DOI: 10.1016/j.automatica.2013.12.008)中,李忠奎">李忠奎研究员及其合作者研究了具有匹配不确定性的多自主体系统的鲁棒一致性问题,提出了分布式自适应控制律的设计方法,并给出了理论证明。
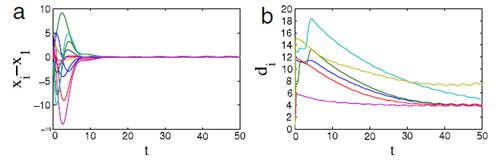
一致性误差与自适应耦合增益