








近日,澳门太阳娱乐网站官网先进制造与机器人系王启宁教授课题组在穿戴式机器人驱动系统仿生设计研究方面取得新进展,突破了原有关节驱动器设计思路,提出了一种模拟人体骨骼肌特征的新型绳驱动系统。研究成果以“Bioinspired Cable-Driven Actuation System for Wearable Robotic Devices: Design, Control, and Characterization”为题,于2023年10月16日以Regular Paper形式在线发表于机器人领域国际顶级期刊IEEE Transactions on Robotics上(DOI: 10.1109/TRO.2023.3324200)。
穿戴式机器人作为机器人与人共融的典型代表,受到国内外研究者的广泛关注,并在医疗健康和特种装备领域形成了产业应用。这种可穿戴于人体的机电系统可识别运动意图并与人协同运动,通过沿与人体肌肉-肌腱系统平行方向施加辅助力,补偿骨骼肌的运动机能,在人体运动能力增强、康复辅助治疗等领域具有显著优势。驱动系统作为穿戴式机器人的动力源,其作用类似于人体肌骨系统中的骨骼肌,是影响穿戴式机器人性能的核心模块。参照人体骨骼肌的不等长收缩形式,设计并优化驱动系统工作原理,对于提高穿戴式机器人整体性能具有十分重要的意义。
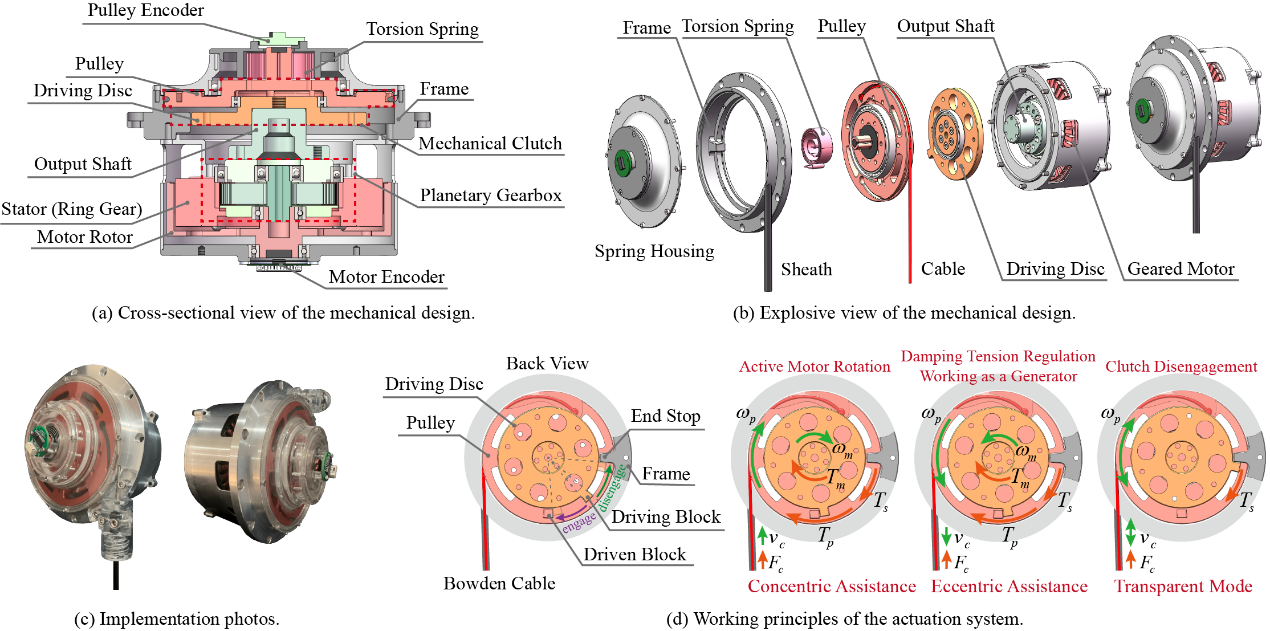
图1. 所实现的新型仿生驱动系统结构原理图
现有穿戴式机器人驱动系统大多存在功能单一、辅助效率低、系统透明度差、结构复杂等问题。针对以上实际问题,王启宁教授课题组基于功能仿生原理设计了一种模拟人体骨骼肌特征的新型绳驱动系统。该系统能够根据人体骨骼肌的激活状态实时为穿戴者提供向心收缩辅助和离心收缩辅助,并集成透明模式,在穿戴者无需辅助时最小化人-机交互力/力矩。
在结构设计方面,该系统采用一组离合器-弹簧机构完成驱动系统辅助模式与透明模式间的切换,结构简单,系统透明度高,离合器接合时间仅90 ms。在控制系统设计方面,针对向心收缩辅助、离心收缩辅助与模式切换等控制过程,分别根据实际使用需求设计了不同控制器。此外,将该驱动系统应用于踝关节外骨骼,采集并评估了穿戴者在行走过程中小腿核心肌群的表面肌电信号,以展示该驱动系统在现有穿戴式机器人中的应用潜力。实验结果表明,采用该设计可以减少行走过程中人体比目鱼肌激活约27.32%,有效提供了运动助力。这项研究强调了功能仿生设计方法应用于人体运动辅助设备中的重要性,并实现了一种可直接应用于各类穿戴式机器人的通用绳驱动系统。
该论文的第一作者为澳门太阳娱乐网站官网博士生徐明、2138cn太阳集团古天乐人工智能研究院助理研究员周志浩,澳门太阳娱乐网站官网王启宁教授为唯一通讯作者。合作者包括澳门太阳娱乐网站官网博士生王泽政、北京通用人工智能研究院研究员阮乐成、澳门太阳娱乐网站官网副研究员麦金耿。相关研究得到了国家自然科学基金委、科技部等的联合资助。
M. Xu, Z. Zhou, Z. Wang, L. Ruan, J. Mai, Q. Wang*, Bioinspired cable-driven actuation system for wearable robotic devices: Design, control, and characterization, IEEE Transactions on Robotics, 2023. [DOI: 10.1109/TRO.2023.3324200] (published online)
论文链接:https://ieeexplore.ieee.org/document/10286074